Tri-wheeler
I visited Lego-world in Zwolle, the Netherlands in oktober 2005. I was impressed by several stands. One of them had a funny vehicle with strangly positioned wheels, I was not allowed to look closely, nor did I get much explanation. Actually, I forgot about the whole thing.
Then, one week later, I got the following mail from a friend who not only enjoys lego, but also "real" robots.
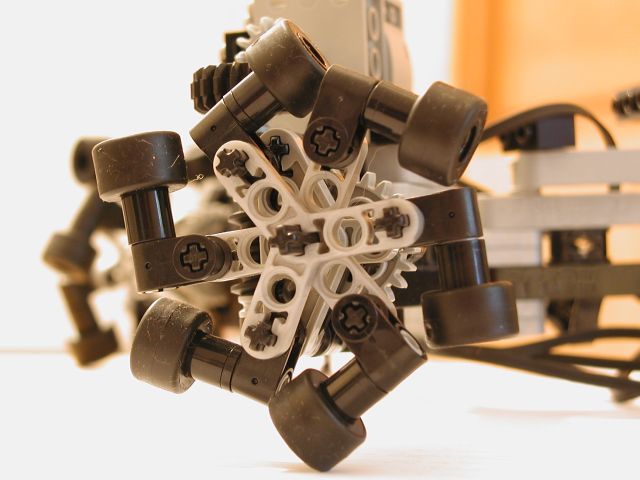
I was at the Robocup matches last week. The hot-thing was driving with three wheels (see photo). Do you know how this is called? Has this been build with lego.
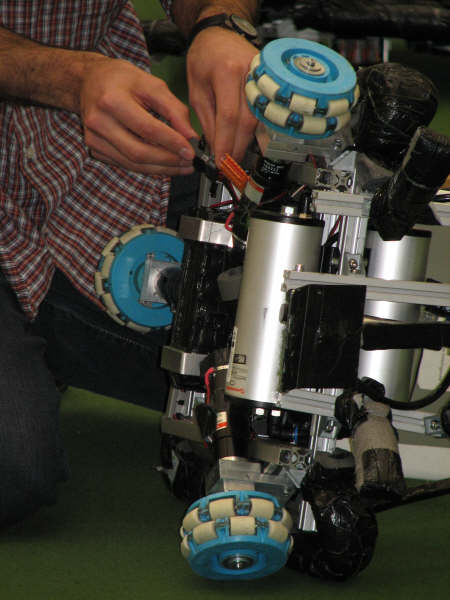

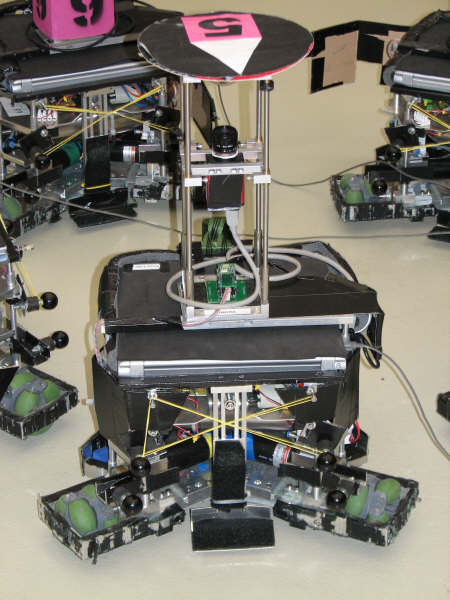
MOC
I wasn't sure whether this was the same as what I saw in Lego-world. But this close-up gave me enough info to try to build one my own. It took one night.
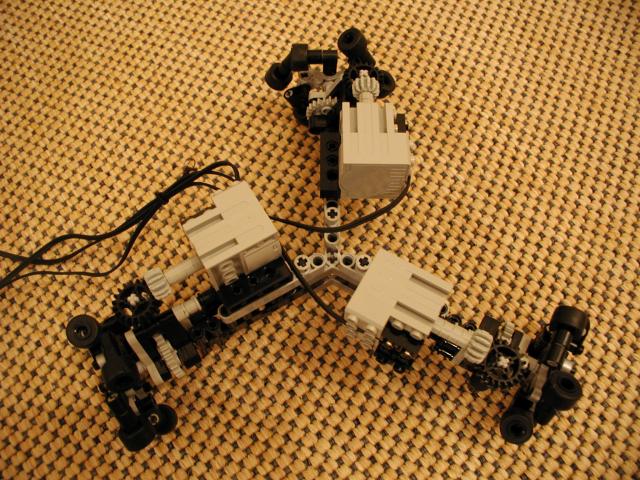
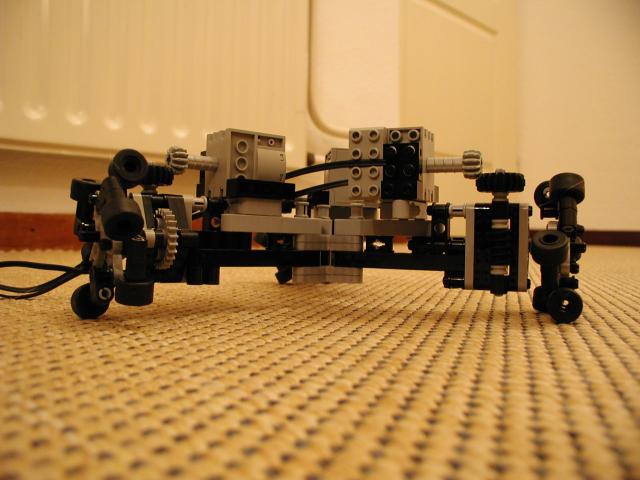

It is driving ok, but not too great. Maybe I geared it down too much.
In the mean time, I learned that this is called "holonomicity". A vehicle is holonomic if it can move to change its velocity instantaneously in all available directions. Note that my tri-wheeler can move at any angle, and at the same time rotate around its center with any speed. What's more, it can change its movement to any other angle and any other rotation instantly. A vehicle with swivel wheels is not holonomic because it takes some time to turn the swivel wheel(s). Sometimes the platform I built with lego is called a Killough platform, named after a wheelchair developped by Stephen Killough.

